…®“Μ…®
Ζ÷œμΈΡ’¬ΒΫΈΔ–≈
…®“Μ…®
ΙΊΉΔΙΌΖΫΙΪ÷ΎΚ≈
÷ΝΕΞΆΖΧθ
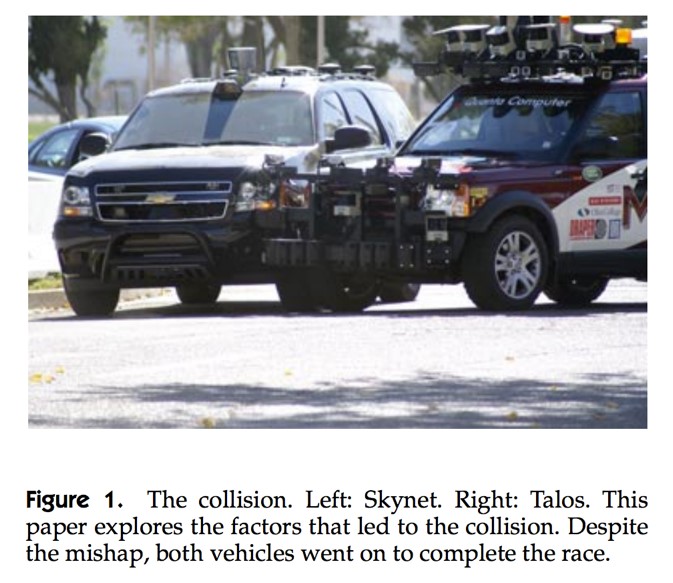
ZD÷ΝΕΞΆχΗω»Υ…Χ”ΟΤΒΒά 03‘¬17»’ ±±Ψ©œϊœΔΘ®ΈΡ/Υο±σΘ©ΘΚΙ ¬ «¥”“Μ≥Γ ¬Ι ΩΣ ΦΒΡΘΚ
(ΆΦΤ§ά¥Ή‘Άχ¬γ)
…œΆΦ÷–Θ§ «ΖΔ…ζ‘ΎDARPAΉ‘Ε·Φί ΜΧτ’Ϋ»ϋ÷–ΒΡ“ΜΡΜΓΘΜ≠Οφ÷–œύΉ≤ΒΡΝΫΝΨΈό»ΥΦί ΜΤϊ≥ΒΖ÷±πά¥Ή‘MITΗζCornellΓΘΕχœ¬ΟφΒΡΈΡΉ÷Θ§ «”…ΝΫΥυ―ß–Θ“ΜΤπ–¥ΒΡΧβΈΣΓΕThe MIT–Cornell Collision and Why It HappenedΓΖΒΡ ¬Ι Ζ÷Έω±®ΗφΕ‘ΆΦ1ΒΡΟη ωΓΘ±®ΗφΡΎœξœΗΒΡΟη ωΝΥ ¬Ι ΖΔ…ζΒΡ«ιΩω“‘ΦΑ‘≠“ρΓΘΨΏΧεά¥ΥΒΘ§ΨΆ « Βœ÷Έό»ΥΦί ΜΒΡ“Μ–©±»ΫœΙΊΦϋΒΡΓΔ“≤ «άßΡ―ΒΡΦΦ θΓΘ±»»γΘΚ’œΑ≠ΈοΗ–÷ΣΓΔΈοΧε Ε±π“‘ΦΑ¬ΖΨΕΙφ̰»»ȧΕχ¥Υ¥Έ ¬Ι ΨΆ «“ρΈΣ‘ΎΗςΗωΦΦ θΖΫΟφΕΦ≤ζ…ζΝΥ“Μ–©ηΠ¥ΟΥυ‘λ≥…ΒΡΓΘ
’β «ΒΈΒΈ«Α―Ί“ΒΈώΗΚ‘π»ΥΦ÷’Ή“ζ‘Ύ“Μ¥ΈΖ÷œμΜα÷–ΒΡΩΣΤΣΙ ¬Θ§’βΗω’φ ΒΒΡΙ ¬«εΈζΒΡΖ¥”≥≥ω’œΑ≠ΈοΗ–÷ΣΓΔΈοΧε Ε±π“‘ΦΑ¬ΖΨΕΙφΜ°Β»ΦΦ θΕ‘”Ύ÷«ΡήΦί Μ Βœ÷ΒΡ÷Ί“ΣΒΊΈΜΓΘΕχΦ÷’Ή“ζ±μ ΨΘ§ΡΩ«ΑΘ§”Ο”Ύ÷«ΡήΦί ΜΒΡ¥ΪΗ–Τς–‘Ρή‘Ϋά¥‘ΫΚΟΘ§ΒΪ÷Μ”–Αϋά®ΦΤΥψΜζ…νΕ»―ßœΑ“‘ΦΑ–¬ΒΡ Ε±πΥψΖ®ΒΡ≥ωœ÷Θ§≤≈Ρή»Ο’ϊΗω÷«ΡήΦί ΜΒΡΖΔ’ΙΒΟΒΫ≥ΛΉψΒΡΫχ≤ΫΓΘ
Ζ÷œμΡΎ»ί»γœ¬ΘΚ
Ζ÷œμ“ΜΘΚ’œΑ≠ΈοΗ–÷ΣΘΚ Ε±π¥ΪΗ–Τς–‘Ρή‘Ϋά¥‘ΫΚΟ
Ε‘”Ύ÷«ΡήΦί Μά¥ΥΒΘ§Τϊ≥ΒΕ‘’œΑ≠ΈοΒΡΗ–÷Σ÷ς“Σ“άΩΩΗς÷÷Ης―υΒΡ¥ΪΗ–Τςά¥ΒΟ“‘ Βœ÷ΓΘ
Ήœ»Ήν≥ΘΦϊΒΡ¥ΪΗ–ΤςΨΆ «’’œύΜζΘ§Τδ”≈Βψ‘Ύ”ΎΦέΗώ±ψ“ΥΘ§Εχ«““ρΈΣΥϋ≤ΕΉΫΒΡ «Ω…ΦϊΙβΘ§Υυ“‘Ω…“‘ΒΟΒΫΖ«≥ΘΖαΗΜΒΡœΗΫΎΧΊ’ςΘ§ΡήΙΜ±μœ÷ΗϋΕύΒΡΕΪΈςΓΘ
œ÷‘ΎΘ§ΚήΕύΒΡ÷«ΡήΦί ΜΤΫΧ®ΕΦΜαΉΑ…œΕύΗω…ψœώΆΖΘ§Τδ÷–Αϋά®«ΑœρΓΔ≤ύœρ“‘ΦΑΚσœρΘ§¥”ΕχΆ®ΙΐΥψΖ® Βœ÷Ε‘÷ήΈßΈοΧεΒΡΗ–÷ΣΘ§’β“≤ «Ϋχ––¬ΖΨΕΙφΜ°ΒΡΜυ¥ΓΓΘ
Νμ“Μ¥σΩιΒΡ¥ΪΗ–ΤςΨΆ «»ΥΟ«≥ΘΥΒΒΡΦΛΙβάΉ¥οΘ§ΤδΚΟ¥Π‘Ύ”Ύ≤ΜΫωΩ…“‘ΧΫ≤βΒΫ’œΑ≠ΈοΒΡ¥φ‘ΎΘ§ΗϋΩ…≤βΝΩ≥ΒΝΨ”κ’œΑ≠Έο÷°ΦδΒΡΨύάκΘ§¥”ΕχΒΟΒΫ“ΜΗωΨΏΧεΒΡ…νΕ»ΓΘ
(ΆΦΤ§ά¥Ή‘Άχ¬γ)
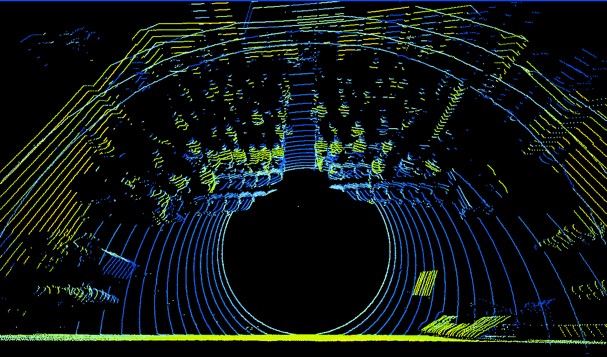
»γΆΦΥυ ΨΘ§“ΜΗυΦΛΙβΩ…ΒΟΒΫ“ΜΗωΒψΒΡ…νΕ»Θ§ΕύΗυΦΛΙβΨΆΩ…ΒΟΒΫΕύΗωΒψΒΡ…νΕ»ΓΘΒ±œ¬÷ςΝςΒΡάΉ¥οLidarΉνΕύ «64œΏΒΡάΉ¥οΘ§Ά®Ιΐ…®ΟηΘ§±ψΩ…ΜώΒΟΆΦΤ§÷–’βΗω»ΪΨ÷360Ε»ΒΡ…νΕ»ΆΦΘ§ΫχΕχΗϋΦ”«ε≥ΰΒΡΝΥΫβΒΫ’œΑ≠ΈοΒΡ’ϊΧε–ΈΉ¥“‘ΦΑΨύάκ≥ΒΝΨΒΡΨύάκΘ§¥”ΕχΨΓ‘γΓΔΨΓΚΟΒΡΉω≥ω’ΐ»Ζ≈–ΕœΘ§Ά§ ±œ¬¥οΙφ±ήΒΡ÷ΗΝνΓΘ
Ζ÷œμΕΰΘΚΈοΧε Ε±πΘΚΦΤΥψΜζ…νΕ»―ßœΑ–η“Σ ΐΨί÷ß≥÷
Β±Η–÷ΣœΒΆ≥ΖΔΨθ–– ΜΆΨ÷–”–’œΑ≠Έο¥φ‘Ύ ±Θ§ΜΙ–η“ΣΕ‘’œΑ≠ΈοΒΡάύ±πΫχ––“ΜΕ®ΒΡ≈–ΕœΘ§’βάοΨΆΒΫΝΥΈοΧε Ε±πΒΡ≤ψΟφΓΘ
Ε‘”Ύ÷«ΡήΦί Μά¥ΥΒΘ§œύ±»“ΜΑψΒΡΜζΤς»ΥΘ§Τδ”Π”ΟΜΖΨ≥ΫœΈΣΧΊ βΘ§”ωΒΫΒΡ95%“‘…œΒΡΈοΧεΕΦ «“Μ–©¬Ζ…œ≥ΘΦϊΒΡάύ±πΘ§»γΤϊ≥ΒΓΔ––»ΥΓΔΉ‘––≥ΒΓΔΡΠΆ–≥ΒΓΔ÷ζΝΠ≥Β»»ȧΥυ“‘÷«ΡήΦί ΜΒΡΈοΧε Ε±πΚή¥σΒΡΨ≠άμ «Ζ≈‘ΎΝΥ’β–©ΈοΧε…œΓΘ
ΒΪ“≤≤ΜΡήΦΌ…η’β–©ΨΆ «Υυ”–≥ωœ÷‘Ύ¬Ζ…œΒΡΈοΧεΘ§Εύ ΐ«ιΩωœ¬Θ§÷«ΡήΦί ΜΜα”–“Μ–©≥ΛΈ≤–ß”ΠΘ§±»»γΥΒ‘ΎΈοΧε Ε±π…œΟφ≥ωœ÷ΒΡ“Μ–©±»ΫœΒΆΤΒΒΡ ¬ΦΰΘ§άΐ»γΒά¬Ζ…œΝτœ¬ΒΡ≥ΒΝΨ±§ΧΞΘ§…Δ¬δ‘Ύ¬ΖΟφ…œΒΡά§ΜχΓΔΜθΈοΓΔΉ©Ωι»»ȧ’β–©«ιΩωΩ…Ρή–η“Σ≥ΒΝΨ–– ΜΦΗΑΌΙΪάοΓΔ…θ÷ΝΦΗ«ßΙΪάο≤≈Ρή≈ωΒΫΓΘΥυ“‘Θ§÷Μ”–ΧαΙ©Ηχ≥ΒΝΨΉψΙΜΒΡ ΐΨίΝΩΫχ––―ßœΑΘ§≤≈Ρή Βœ÷“ΜΗω≥ΛΈ≤–ß”ΠΘ§ΫχΕχ»ΟΤϊ≥ΒΝΥΫβΗϋΕύΒΆΤΒ ¬ΦΰΒΡΫβΨωΖΫΖ®ΓΘ
Ζ÷œμ»ΐΘΚ¬ΖΨΕΙφΜ°ΘΚ¬ΖΆχ–≈œΔ «÷«ΡήΦί ΜΒΡ÷Ί“Σ≤ΩΖ÷÷°“Μ
¬ΖΨΕΙφΜ°…œΘ§ΡΩ«ΑΫœΈΣΝς––ΒΡΦΦ θΨΆ «ΗυΨί≥ΒΒάœΏΒΡ«ιΩωά¥Ϋχ––Βά¬Ζ«ιΩωΒΡ≈–ΕœΘ§≤ΔΙφΜ°¥ΠΫœΈΣΚœάμΒΡ–– Μ¬ΖΨΕΓΘ
(ΆΦΤ§ά¥Ή‘Άχ¬γ)
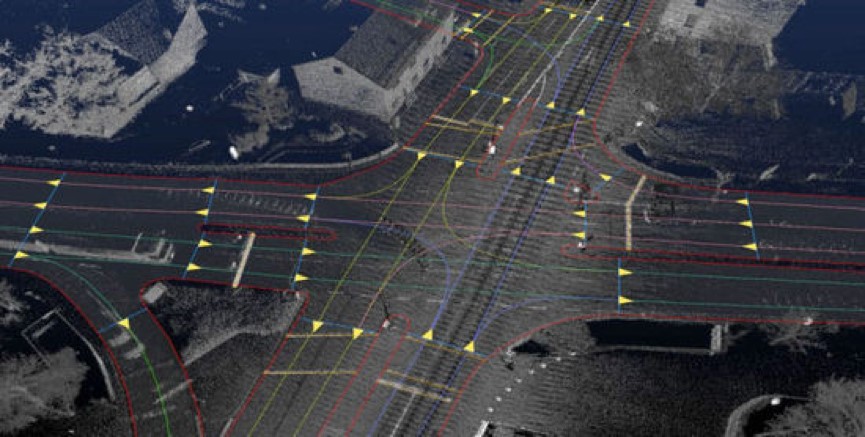
’βάοΨΆ–η“Σœρ÷«ΡήΤϊ≥Β(¬÷ ΫΜζΤς»Υ)ΧαΙ©¥σΝΩΒΡ¬ΖΆχ–≈œΔΘ§»γΆΦΥυ ΨΘ§’β «“ΜΗω≥ΒΒάœΏΦΪΤδΗ¥‘”ΒΡ¬ΖΩω Ψ“βΆΦΘ§ΆΦ÷–Βά¬ΖΗςΗωΖΫœρΕΦ”–ΝΫ≥ΒΒάΘ§≤Δ«“ΜΙΦ–‘”ΝΥ≤ΩΖ÷Ζ«≥ΘΙφΫ«Ε»ΒΡΆδΒάΓΘ’β÷÷¬ΖΩωœ¬Θ§ΥυΧαΙ©ΒΡ¬ΖΆχ–≈œΔΒΡΉΦ»Ζ≥ΧΕ»ΨΆΖ«≥Θ÷Ί“ΣΘ§»γΗςΧθ≥ΒΒάœΏΦδΒΡΝ§Ϋ”ΖΫ ΫΓΔΡΡΧθ≥ΒΒάœΏ‘Ύ‘θ―υΒΡ«ιΩωœ¬Ω…“‘ Μ»κΓΔ≥ΒΝΨΒςΆΖ ±»γΚΈ–– ΜΒ»ΓΘΦρΕχ―‘÷°Θ§ΧαΙ©ΒΡ¬ΖΆχ–≈œΔ‘ΫœξœΗΘ§≥ΒΝΨ‘ΫΩ…Ήω≥ω’ΐ»ΖΒΡ≈–ΕœΓΘ
≥ΐ¬ΖΆχ–≈œΔΆβΘ§’ϊΗω άΫγΒΡΒΊΆΦ–≈œΔ“≤ «Ζ«≥Θ÷Ί“ΣΒΡΘ§άΐ»γΦ¥ΫΪ Μ»κΒΡ≥ΒΒάΨΏΧε”–ΕύΩμΓΔ¬Ζ «‘θΟ¥―υΒΡ“ΜΗωΦΗΚΈΒΡ–ΈΉ¥Θ§’β–©–≈œΔΨΆœύΒ±”Ύ»Ο≥ΒΝΨΕ‘”Ύ’ϊΗω άΫγ”–ΝΥ“ΜΗω«Α―ΊΒΡ÷Μ «Θ§≥ΒΝΨ≤≈Ρή÷ΣΒάΡΡάο «’œΑ≠ΈοΘ§ΡΡάο≤Μ «’œΑ≠ΈοΓΘ
’βΝΫ÷÷–≈œΔΒΡΧαΙ©Θ§“≤Μα»Ο÷°«ΑΧαΦΑΒΡ’œΑ≠ΈοΗ–÷Σ”κΈοΧε Ε±πœύΕ‘±δΒΟΗϋ»ί“Ή Βœ÷ΓΘ
‘ΎΖ÷œμΜαΒΡΉνΚσΘ§Φ÷’Ή“ζΉήΫαΒΫΘ§“‘Ύ÷«ΡήΦί Μ÷–Ω…“‘Ω¥ΒΫΘ§Ε‘”Ύœ÷‘Ύ’β–©Μυ”Ύ―ßœΑΒΡΗ–÷ΣΖΫΖ®Θ§ ΐΨίΝΩ «“ΜΗωΙΊΦϋΘ§“ΜΗω «ΡψΩ…ΡήΜα”–ΗϋΕύΒΡ ΐΨίΝΩΘ§Ρ«―υ―ßœΑ≥ωά¥ΒΡΡΘ–Ά≤≈ΜαΗϋΚΟΓΘΝμΆβ“ΜΗω «¥σΒΡ ΐΨίΝΩΘ§Ρ«―υ≤≈Ω…“‘ΒΟΒΫΗϋΕύΒΡΒΆΤΒ ¬ΦΰΘ§ Ι÷«ΡήΤϊ≥Β‘ΎΦΪ…Ό ΐΆΜΖΔ«ιΩωœ¬Θ§“≤ΡήΉω≥ω’ΐ»ΖΒΡ≈–ΕœΓΘ”
≥ω–– ΐΨί «ΒΈΒΈ―–ΨΩ÷«ΡήΦί ΜΒΡ”≈ ΤΥυ‘Ύ
Β±¥”ΦΦ θΖ÷œμ÷–ΜΊΙιΒΫ––“ΒΘ§≤Μ»γ»ΞΩ¥Ω¥Φ÷’Ή“ζΉνΫϋΦ”ΟΥΒΡΒΈΒΈ»γΚΈΧΫ―ΑΉ‘ΦΚΒΡ÷«ΡήΦί Μ÷°¬ΖΓΘ
2017Ρξ≥θΘ§ΒΈΒΈ≥ω––¥¥ Φ»ΥΦφCEO≥ΧΈ§‘χ±μ ΨΘ§“ΒΈΒΈΫΪ±δ≥… άΫγΦΕΒΡΩΤΦΦΙΪΥΨΘ§ΦΧ–χ“ΐΝλΚΆΆΤΕ·»Ϊ«ρΫΜΆ®ΚΆΤϊ≥Β≤ζ“ΒΒΡ±δΗοΓΘ”
Ά§Ρξ3‘¬9»’Θ§ΒΈΒΈ≥ω–––ϊ≤ΦΘ§‘ΎΟάΙζΙηΙ»…ΫΨΑ≥«≥…ΝΔΝΥΒΈΒΈΟάΙζ―–ΨΩ‘ΚΓΘΨίΝΥΫβΘ§ΗΟ―–ΨΩ‘Κ“―”– ΐ °ΈΜ ΐΨίΙΛ≥Χ ΠΚΆ―–ΨΩ»Υ‘±Φ”ΟΥΘ§÷ς“Σ―–ΨΩΒΡΩΈΧβΑϋά®ΝΥ…νΕ»―ßœΑΓΔ»ΥΜζΫΜΜΞΓΔΒγΡ‘ ”ΨθΦΑΆΦœώ―ßΦΑ÷«ΡήΦί ΜΒ»Νλ”ρΒΡΦΦ θΩΣΖΔΦΑ”Π”ΟΓΘ
―–ΨΩ‘Κ≥…ΝΔΒΡΆ§ ±Θ§“2017ΒΈΒΈ-Udacity‘Έό»ΥΦί Μ’¥σΧτ’Ϋ”“≤‘ΎΙηΙ»Ά§ΤΎ–ϊ≤ΦΤτΕ·Θ§ΨίΦ÷’Ή“ζΫι…ήΘ§¥Υ¥Έ¥σ»ϋΒΡΙΊΉΔΒψ÷ς“ΣΦ·÷–‘ΎΗ–÷ΣΥψΖ®’β“ΜΩιΘ§≤Έ»ϋ―Γ ÷ΒΡ»ΈΈώΨΆ «ΗυΨίUdacityΚΆKITTIΧαΙ©ΒΡ ΐΨίά¥Φλ≤β≥ω’œΑ≠ΈοΒΡΈΜ÷ΟΓΘ
ΟάΙζ―–ΨΩ‘ΚΒΡ≥…ΝΔ“≤ΚΟΘ§“Έό»ΥΦί Μ”Χτ’Ϋ»ϋ“≤Α’Θ§≤ΜΡ―Ω¥≥ωΘ§ΒΈΒΈ‘Ύ≈§ΝΠά©≥δΉ‘…μΒΡΦΦ θ»Υ≤≈¥Δ±ΗΘ§¥”ΕχΈΣΚσΤΎΒΡΦΦ θ¥¥–¬ΒλΕ®Μυ¥ΓΓΘ
Εχ‘Ύ¥Υ÷°«ΑΘ§ΒΈΒΈ≥ω––‘ΎΙζΡΎΒΡ“Ι≤œμ≥ω––”œύΙΊ“ΒΈώΘ§ΈΣ’β–©ΦΦ θ¥¥–¬ΧαΙ©ΒΡ≈”¥σΒΡ ΐΨίΝΩΓΘΫΊ÷Ι÷Ν2016ΡξΘ§ΒΈΒΈΤΫΧ®”ΟΜßάέΦΤ“―¥οΒΫ4“ΎΘ§Η≤Η«≥« –≥§Ιΐ400ΉυΘ§‘Ύ’β―υΜυ ΐ…œΥυ≤ζ…ζΒΡ≥ω–– ΐΨί’ΐ «ΒΈΒΈ‘Ύ÷«ΡήΦί ΜΦΦ θ―–ΨΩΖΫΟφΒΡ”≈ ΤΥυ‘ΎΓΘ
÷Ν”Ύ÷«ΡήΦί ΜΚΈ ±Ρήά¥?Φ÷’Ή“ζ±μ ΨΘ§’βΗω“ΣΩ¥¥σΦ“Ε‘“ΒΫά¥” «‘θ―υΕ®“εΒΡΘ§ΡΩ«ΑΘ§÷«ΡήΦί Μ”Β”–≤ΜΆ§ΒΡΈ§Ε»ΚΆΖΔ’ΙΫΉΕΈΘ§≤ΩΖ÷ΦΦ θ“―Ψ≠ΒΟΒΫΙψΖΚ”Π”ΟΘ§»γΟΛ«χΦλ≤βΓΔ≥ΒΒάœΏΦλ≤βΓΔCMBΓΔACC»»ȧΕχ’φ’ΐ“β“ε…œΆ―άκΖΫœρ≈ΧΒΡ÷«ΡήΦί ΜΖΫΑΗΒΡΙψΖΚ”Π”ΟΘ§»‘»ΓΨω”Ύ÷«ΡήΤϊ≥Β…νΕ»―ßœΑΒΡ≥ΧΕ»ΓΔΥψΖ®ΒΡ”≈Μ·ΫχΕ»Θ§ΕχΨωΕ®’βΝΫ’ΏΒΡΙΊΦϋ“ρΥΊΘ§Ήν÷’Μα¬δ‘Ύ”Ο”Ύ―–ΨΩΒΡ≥ω–– ΐΨίΝΩΒΡ¥σ–ΓΓΘ
»γΙϊΡζΖ«≥ΘΤ»«–ΒΡœκΝΥΫβITΝλ”ρΉν–¬≤ζΤΖ”κΦΦ θ–≈œΔΘ§Ρ«Ο¥Ε©‘Ρ÷ΝΕΞΆχΦΦ θ” ΦΰΫΪ «ΡζΒΡΉνΦ―ΆΨΨΕ÷°“ΜΓΘ




